ECE :: Automatic Control Systems
-
Assertion (A): When the performance of a stable second order system is improved by a PID controller, the system may become unstable.
Reason (R): PID controller increases the order of the system to 3.
-
The root locus branches
-
In force voltage analogy, displacement is analogous to
-
The angular location of poles depends on
-
For the characteristic equation s5 + s4 + 2s3 + 2s2 + 3s + 15 = 0, the number of roots in left half s plane are
-
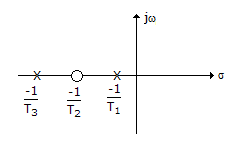
The pole zero plot of the given figure is for

 Whatsapp
Whatsapp
 Facebook
Facebook


 , the maximum resonance peak is
, the maximum resonance peak is