ECE :: Automatic Control Systems
-
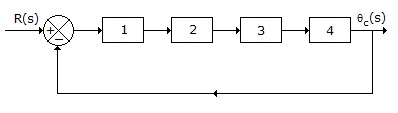
The given figure shows a hybrid servosystem. The components 1, 2, 3, 4 are respectively
-
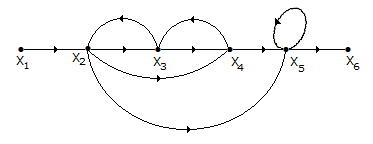
For the signal flow graph of the given figure consider the following statements
- It has three forward paths
- It has three individual loops
- It has two non touching loops
-
For the transport lag G(jω) = e-jωT, the polar plot is
-
Consider the following statements:
- The positiveness of coefficients of characteristic equation is necessary as well as sufficient condition for stability of first and second order systems.
- The positiveness of coefficients of characteristic equation ensures negativeness of real roots but is not sufficient condition for stability of third and higher order systems.
-
Assertion (A): The time response, usually, is slower with lag compensation.
Reason (R): The natural undamped frequency and bandwidth are increased.
-
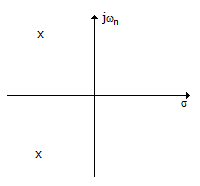
For a second order system, the position of poles is shown in the given figure. This system is
-
A lag compensator provides attenuation in
-
A stepper motor is essentially

 Whatsapp
Whatsapp
 Facebook
Facebook


 the corner frequency is
the corner frequency is