ECE :: Automatic Control Systems
-
Which of the following is used to obtain output position in a position control system?
-
In a synchro transmitter-control transformer, the voltage induced in rotor winding of control transformer is zero when the angular displacement between rotors of transmitter and transformer is
-
In the given figure, the curves 1, 2, 3 are respectively for
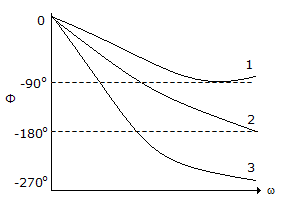
-
DC tachogenerator can be used in
-
In a two phase servomotor the two stator windings have a phase difference of
-
For a stable system having two or more gain crossover frequencies the phase margin is measured at the highest crossover frequency.
-
The block diagram of the given figure for
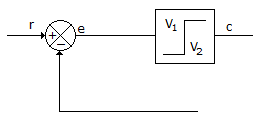
-
In a two phasor servomotor, the direction of rotation of the rotating field depends on
-
Assertion (A): Points in the s plane at which function G(s) is not analytic are called singular, points.
Reason (R): Singular points at which the function G(s) or its derivative approach infinity are called poles.

 Whatsapp
Whatsapp
 Facebook
Facebook