ECE :: Automatic Control Systems
-
Assertion (A): If points at infinity are included, G(s) has same number of poles and zeros.
Reason (R): The function
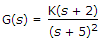 has a zero at s = - 2.
has a zero at s = - 2. -
If the characteristic equation is (λ + 1) (λ + 2) (λ + 3) = 0, the eigen values are
-
Assertion (A): When performance specifications are given in term of transient response characteristics, root locus method is a suitable method.
Reason (R): When performance specifications in terms of state variables are given, modern control methods can be used.
-
Integral control action
-
The sensor generally used in incremental optical encoder is
-
Robotic manipulator arms mostly use
-
In terms of ξ and ωn the settling time of a second order systems for 2% criterion and step input is equal to

 Whatsapp
Whatsapp
 Facebook
Facebook


 , the closed loop pole will be located at s = -12 when K =
, the closed loop pole will be located at s = -12 when K =


