ECE :: Automatic Control Systems
-
The log magnitude curve of factor jω is a straight line having a slope of 20 dB/decade.
-
Time rate of change in heat energy is analogous to
-
Assertion (A): In control system velocity error is not an error in velocity but is an error in position due to a ramp input.
Reason (R): For a type of system velocity error is zero.
-
For the system of the given figure, the break away and break in points are determined from the conditions
 . Then K =
. Then K =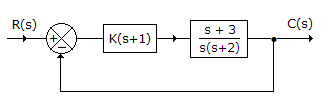
-
Assertion (A): For an underdamped system with damping ratio ξ, the maximum overshoot is e-ξp/(1-ξ2)0.5
Reason (R): Peak time of a second order under damped system = p/ωd where ωd is frequency of damped oscillations.
-
I-PD controlled system has
-
Assertion (A): Laplace transform of impulse function is equal to area under the impulse.
Reason (R): An impulse function whose area is unity is called unit impulse function.
-
Integral error compensation changes a second order system to

 Whatsapp
Whatsapp
 Facebook
Facebook