ECE :: Automatic Control Systems
-
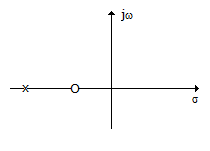
The pole-zero configuration of the given figure can be for
-
Which of the following represents constant magnitude locus for M = 1?
-
Assertion (A): A synchro control transformer has nearly constant impedance across its rotor terminals.
Reason (R): Rotor of a synchro control transformer is cylindrical so as to give uniform flux distribution.
-
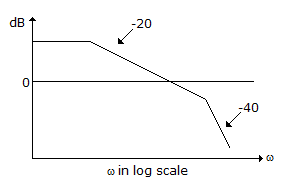
The log magnitude plot of the given figure is for
-
Consider the following statements relating to synchros
- Rotor of control transformer is either disc shaped or umbrella shaped
- Rotor of transmitter has low magnetic reluctance
- Transmitter and control transformer pair act as error detector
-
For a second order system the damping factor is varied from 0 to 1. The locus of poles is
-
Assertion (A): The function
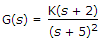 has a double pole at s = - 5.
has a double pole at s = - 5.Reason (R): If the function [G(s)] (s + p)n for n = 1, 2, 3 ... has a finite non-zero value at s = - p, then s = - p is called a pole of order n.
-
In a synchro transmitter, which coil acts as primary?
-
Assertion (A): The transient performance of a control system is generally analysed by using unit step function as reference input.
Reason (R): Impulse is the most common input found in practice.
-
For a second order system ωn is natural frequency, ωd is frequency of damped oscillations and ζ is damping factor. Then

 Whatsapp
Whatsapp
 Facebook
Facebook

