ECE :: Automatic Control Systems
-
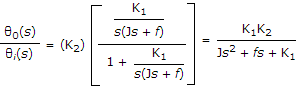
In position control system the device used for providing rate feedback voltage is
-
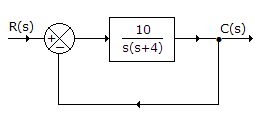
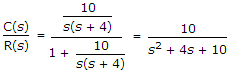
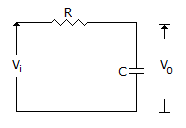
For the system of the given figure, the closed loop poles are at
-
Derivative control action is effective?
-
Modelling error may occur due to
-
In Bode diagrams an octave is a frequency band from

 Whatsapp
Whatsapp
 Facebook
Facebook


 .
. 



 .
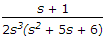
.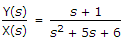 .If x(t) = t2, Y(s) is
.If x(t) = t2, Y(s) is


 .
.
 = 0.1 or - 20 dB.
= 0.1 or - 20 dB. damping ratio is
damping ratio is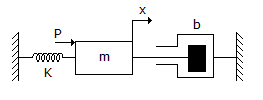


 . Hence
. Hence  .
.