ECE :: Automatic Control Systems
-
The phase angle curve of G(jω) H(jω) can be drawn
-
The most commonly used devices for differencing and amplification, in control systems, are
-
In Bode method of stability analysis, the error curve is not symmetric about corner frequency.
-
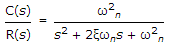
The transfer function
 can be for
can be for -
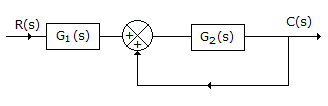
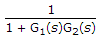
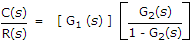
For the feedback system with closed loop transfer function
 the settling time for 2% tolerance
the settling time for 2% tolerance -
In a second order system with a unit step input, the speed of response is high if system is
-
A thermometer requires 1 minute to indicate 98% of its final response to a step input. If it is a first order system the time constant is
-
Assertion (A): A slight change in pole-zero configuration can cause only minor changes in root locus configuration.
Reason (R): Asymptotes show the behaviour of root loci for |s| >> 1
-
In a second order system ωn = 10 rad/sec and ζ = 0.1, then ωd =

 Whatsapp
Whatsapp
 Facebook
Facebook





 β > 1
β > 1  is less than
is less than  .
.


 and settling time for 2% tolerance is 4T.
and settling time for 2% tolerance is 4T.