ECE :: Automatic Control Systems
-
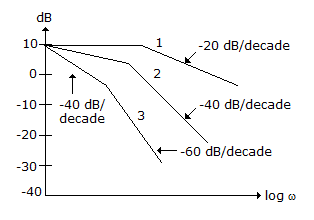
The given figure shows dB magnitude plots for type 0, type 1 and type 2 systems. Out of these
-
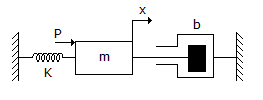
Assertion (A): A. For a unity feedback system, with
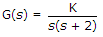 , the settling time of step response is constant for all values of K ≥ 1
, the settling time of step response is constant for all values of K ≥ 1Reason (R): The real part of the roots for all values of K ≥ 1 are negative.
-
Assertion (A): F(s) is valid throughout s plane except at poles of F(s).
Reason (R): £[f1(t) + f2(t)] = £[f1(t)] + £[f2(t)]
-
In the given figure shows a root locus plot. Consider the following statements for this plot
- The open loop system is a second order system
- The system is overdamped for K > 1
- The system is stable for all values of K

-
In terms of ξ and ωn the settling time (5% criterion) of a second order system for a step input, is equal to
-
The poles of an RC function

 Whatsapp
Whatsapp
 Facebook
Facebook