ECE :: Automatic Control Systems
-
Which dc servomotor has minimum inertia?
-
Gas flow resistance is defined as
-
Examine the following statements
- A small size hydraulic actuator can develop good torque.
- It is easy to maintain a hydraulic system leak proof.
- Both linear and rotatary hydraulic actuators are available.
- Hydraulic power is more easily available than electric power.
-
The given figure shows a constant current source driving a parallel RC circuit. It is equivalent to

-
Consider the following statements regarding negative feedback
- It increases system gain
- It improves sensitivity
- It improves system stability
-
Which of the following are applications of position control systems?
-
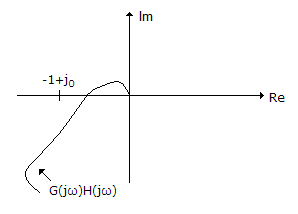
The system in the given figure has
-
Assertion (A): Increasing the system gain improves steady state behaviour but may result in instability.
Reason (R): A compensator is inserted into a system to ensure specified performance.
-
Assertion (A): Inverse Laplace transform can be found from P(s) by inversion integral.
Reason (R): The function f(t) is assumed to be zero for t < 0.
-
For a second order system delay time td is the time required to reach

 Whatsapp
Whatsapp
 Facebook
Facebook



