ECE :: Automatic Control Systems
-
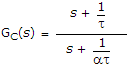
A lead compensator is basically a
-
In Bode diagram (log magnitude plot) of the factor 1/(1 + jωT) in the transfer function the log magnitude for ω << 1/T can be approximated by
-
Assertion (A): The part of root locus on the real axis is not dependent on the poles and zeros which are not on the real axis.
Reason (R): Poles and zeros which are not on the real axis occur in conjugate pairs
-
For underdamped second order systems the rise time is the time required for the response to rise from
-
The open loop frequency response of a unity feed back system is as under
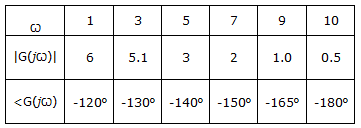
The gain margin and phase margin respectively are -
Assertion (A): A large negative feedback is deliberately introduced in an amplifier to make its gain independent of variation in parameters of active device.
Reason (R): A large negative value of feedback results in a high value of return difference compared to unity which makes the feedback gain inversely proportional to the feedback factor.
-
The transfer function
 can be for
can be for -
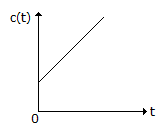
In response to a unit step input the controller output in given figure is for
-
An electromechanical device which actuates a train of step angular movements in response to a train of input pulses on one to one basis is

 Whatsapp
Whatsapp
 Facebook
Facebook


 .
. is constant and equal to - 90° for all values of ω
is constant and equal to - 90° for all values of ω .
. and
and  is more than
is more than  .
.